


3-stapsproces voor het downloaden, installeren en uitvoeren van de Linux Galaxy SDK voor uw ARM-gebaseerde hardware zoals Raspberry Pi of Nvidia Jetson

Leer hoe u de Linux Galaxy Software Development Kit (SDK) kunt downloaden, installeren en gebruiken voor ARM-gebaseerde hardware zoals de Raspberry Pi of Nvidia Jetson. Door cameraparameters met deze SDK te wijzigen, kunt u beelden verkrijgen op onze USB3- en GigE-camera's. Met onze camera's hebben we kleine ontwikkelborden getest, zoals de Nvidia Jetson-serie en de Raspberry Pi. De afbeeldingen in het artikel zijn afkomstig van Linux-ontwikkelborden. Het uiterlijk op uw machine kan variëren. In dit artikel leiden we u door de drie eenvoudige stappen voor het downloaden, installeren en gebruiken van de Galaxy View SDK op Linux voor ARM-gebaseerde hardware.
STAP 1: DOWNLOAD DE LINUX GALAXY SDK
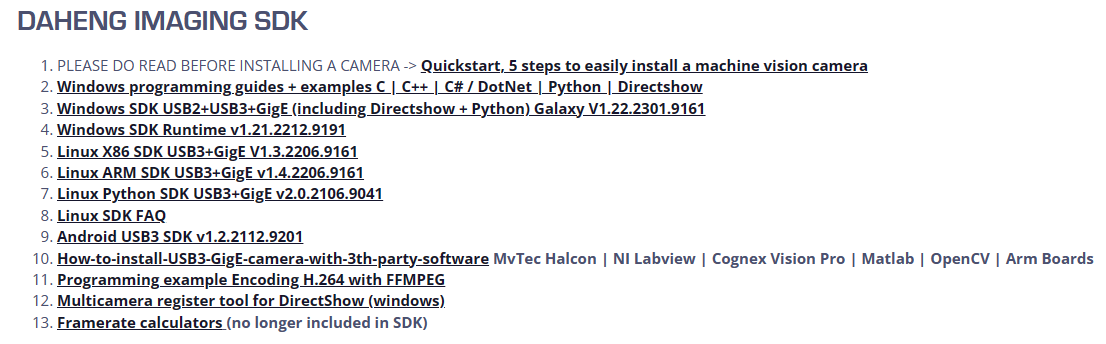
Bezoek onze downloadpagina om de meest geschikte Linux Galaxy SDK-versie voor uw hardwarearchitectuur te selecteren. Voor ARM-gebaseerde hardware zoals de Raspberry Pi of Nvidia Jetson kiest u de Linux ARM SDK (nummer 6 in de onderstaande schermafbeelding).
STAP 2: INSTALLEER DE SDK
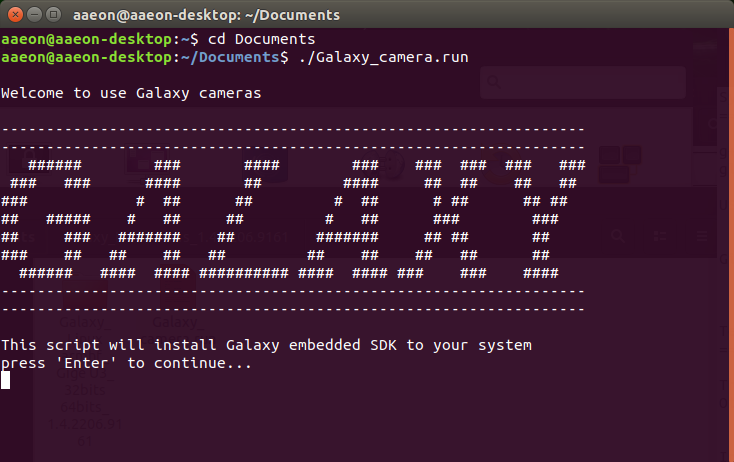
Nadat u de Linux ARM SDK heeft gedownload, opent u de map en volgt u de stapsgewijze handleiding in het README-bestand. Controleer uw Linux-systeemvereisten voordat u het bestand Galaxy_camera.run uitvoert om de Galaxy SDK te installeren, die GxViewer en GxGigeIPConfig bevat.
STAP 3: CONFIGUREER DE CAMERA EN VOER GALAXY VIEW UIT
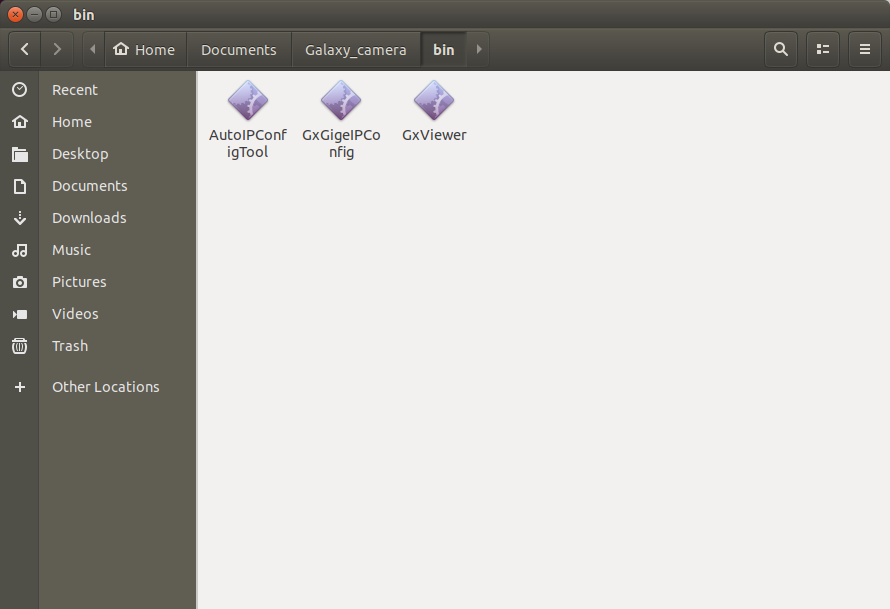
Na het installeren van de Galaxy SDK wordt de map Galaxy camera gemaakt op dezelfde locatie als het bestand Galaxy_camera.run. In deze map vindt u GxGigeIPConfig en GxView.
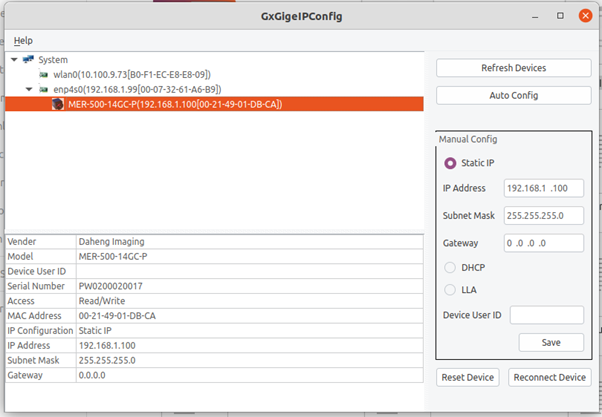
GxGigeIPConfig
Gebruik dit programma om een industriële GigE-camera te configureren door het juiste IP-adres in te voeren. De AutoConfig-knop programmeert automatisch een werkend IP-adres, of u kunt dit handmatig instellen. Als het netwerkadres van de camera en de Ethernet-adapter niet overeenkomen, wordt de camera niet correct weergegeven in GxViewer.
GxViewer
Nadat u uw camera heeft geconfigureerd, voert u GxViewer uit om de parameters van uw industriële camera te wijzigen en foto's te maken zonder codering. Kies je camera in de software en maak een verbinding met OpenDevice. Vervolgens kunt u basisparameters zoals ROI, belichting, versterking en witbalans wijzigen.
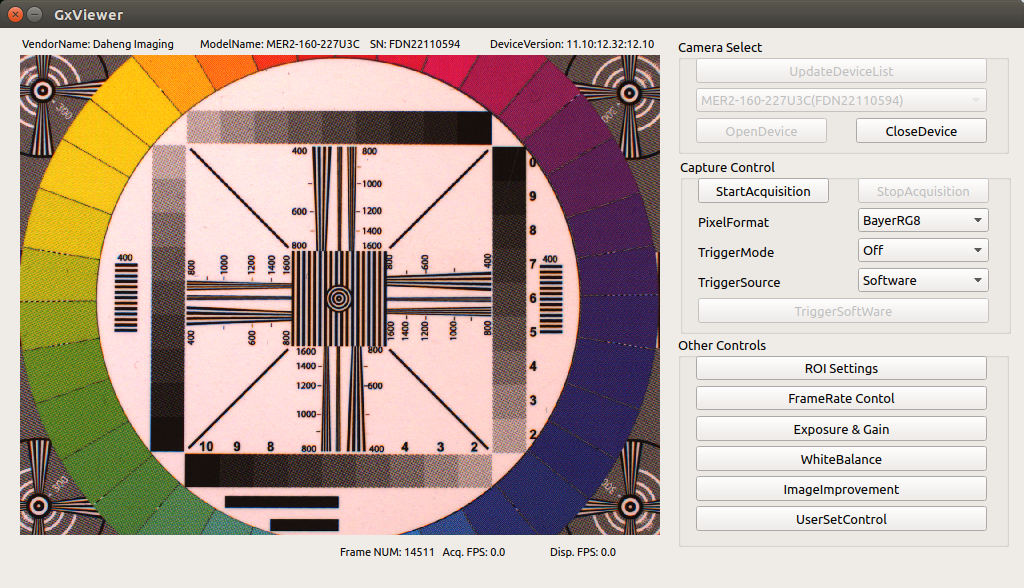
Houd er rekening mee dat de opties beperkt zijn in vergelijking met Galaxy Viewer voor X86-hardwareplatforms, maar dat de ontbrekende functies binnen uw applicatie kunnen worden gebruikt door uw eigen programma te schrijven met behulp van de SDK.
OPMERKINGEN
We hebben een bord getest voor Nvidia Jetson TX2 NX met twee MER2-160-227U3C camera's. Voor elke camera kunt u een individuele GxViewer openen. De framesnelheid was 190 fps met één actieve camera en daalde naar 130 fps wanneer beide camera's waren aangesloten. Hieruit blijkt dat de USB3-poort niet krachtig genoeg is om de volledige bandbreedte van USB3 te gebruiken. Houd er rekening mee dat andere hardware de prestaties kan beïnvloeden.
Niet alle USB3-poorten ondersteunen USB3 industriële vision-camera's op sommige kleine ontwikkelingsborden. Bij gebruik van Nvidia Jetson TX2 NX ondersteunde bijvoorbeeld één op de vier USB3-poorten geen camera.
LINUX SDK OP EEN ARM-BASED DEVELOPMENT BOARD VERDERE OPLOSSINGEN
Als u problemen ondervindt bij de installatie van Daheng Imaging C++ of Python SDK op een op ARM gebaseerd ontwikkelbord, neem dan contact op met isupport@get-cameras.com . Onze technische ondersteuningsafdeling helpt u graag verder.