


I/O-besturing: Leer hoe u machine vision-verlichting kunt activeren en hoe u een triggersensor kunt gebruiken om hardwaretriggers aan uw machine vision-camera te geven

I/O-besturing is cruciaal voor het effectief activeren van machine vision-camera's en -lichten. Industriële machine vision-camera's staan bekend om hun betrouwbaarheid en robuustheid, dus het is essentieel om te beschikken over een betrouwbaar extern triggersysteem.
Wanneer een snelle bediening vereist is, moet de triggersensor snel reageren. Door de spanning op de gespecificeerde pinnen van de I/O-connector van de camera te wijzigen, initieert de triggersensor het triggerproces. Dit triggersysteem werkt op basis van de stijgende of dalende flank van de spanning, ofwel van laag naar hoog (stijgende flank) of van hoog naar laag (dalende flank).
Door deze aanpak te implementeren, kan de machine vision-camera snel reageren op trigger-sensoractiveringen, waardoor een snelle en nauwkeurige opname wordt gegarandeerd.
Neem hieronder contact op of lees het artikel verder als we u kunnen helpen met I/O-controle.
De machine vision-camera instellen voor het accepteren van triggers van de triggersensor
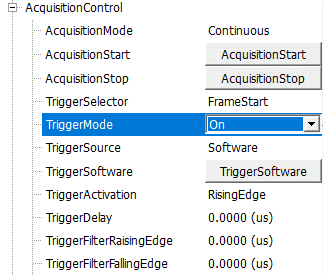
Om ervoor te zorgen dat een machine vision-camera triggers van een triggersensor accepteert, kunt u onze Galaxy SDK-software gebruiken. Wanneer aangesloten op de camera, volgt u deze stappen om uw triggerbron te programmeren:
Activeer de triggermodus door “TriggerMode” in te stellen op “On”.
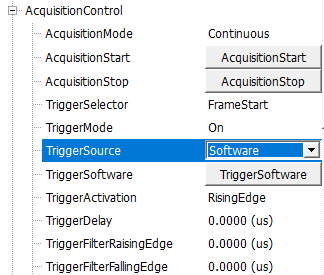
Selecteer de triggerbron. Als u de softwareoptie kiest, wordt de machine vision-camera geactiveerd door op de knop "TriggerSoftware" te drukken.
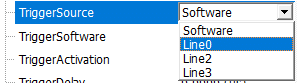
Als alternatief kunt u bij gebruik van een triggersensor de ingangslijn selecteren waar het triggersignaal zal worden ontvangen, zoals 'line0'.
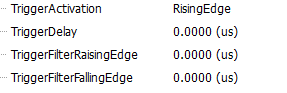
Zodra deze instellingen zijn geconfigureerd, is de machine vision-camera klaar om te worden geactiveerd via de opgegeven invoerlijn (bijvoorbeeld lijn0). Voor verdere optimalisatie kunt u de triggerinstellingen aanpassen door parameters zoals RisingEdge, FallingEdge, TriggerDelay en TriggerFilters te definiëren om ongewenste triggers te voorkomen die worden veroorzaakt door ruis in het triggersignaal.
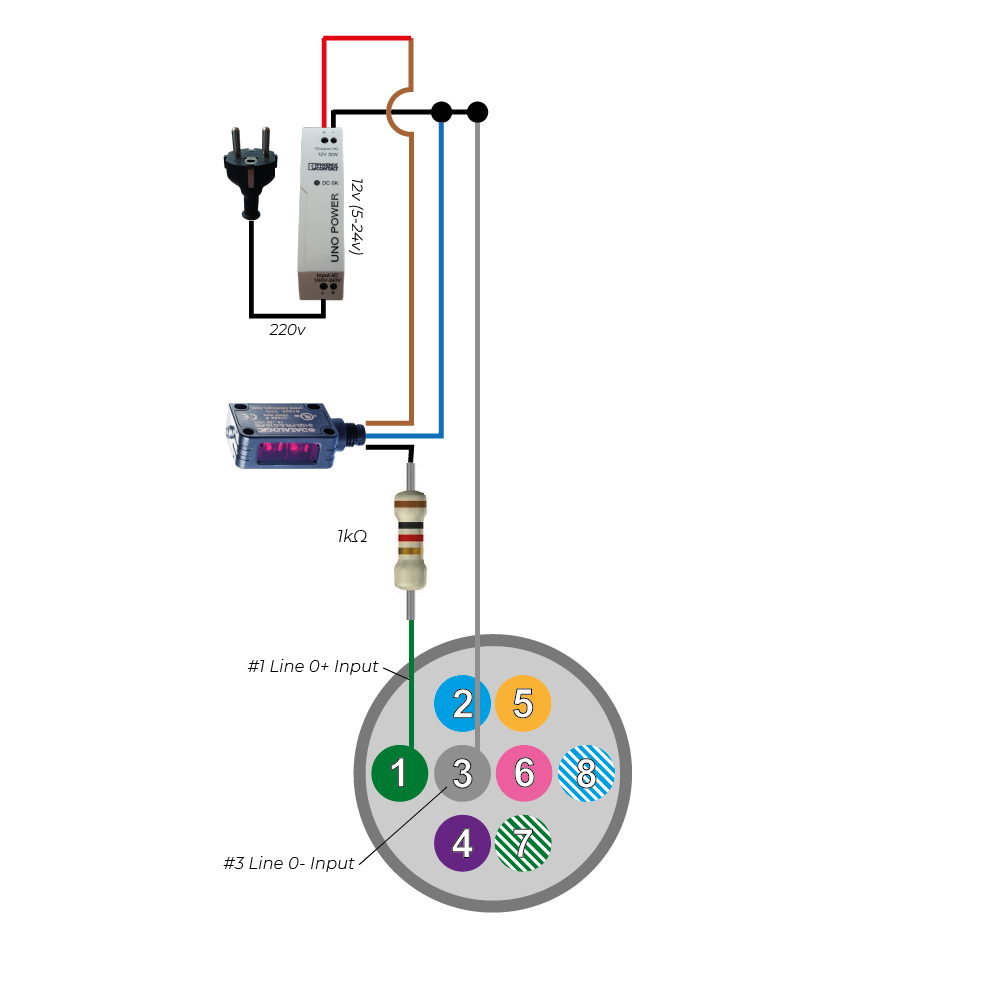
De triggersensor gebruiken om de machine vision-camera te activeren
In ons schema demonstreren we het gebruik van de retroreflecterende fotosensor S100-PR-5-C10-PK als triggersensor om de machine vision-camera hardwarematig te activeren. Wanneer een object de gereflecteerde lichtstraal van de sensor onderbreekt, wordt er stroom naar de ingangspin van de camera gestuurd, waardoor de camera wordt geactiveerd.
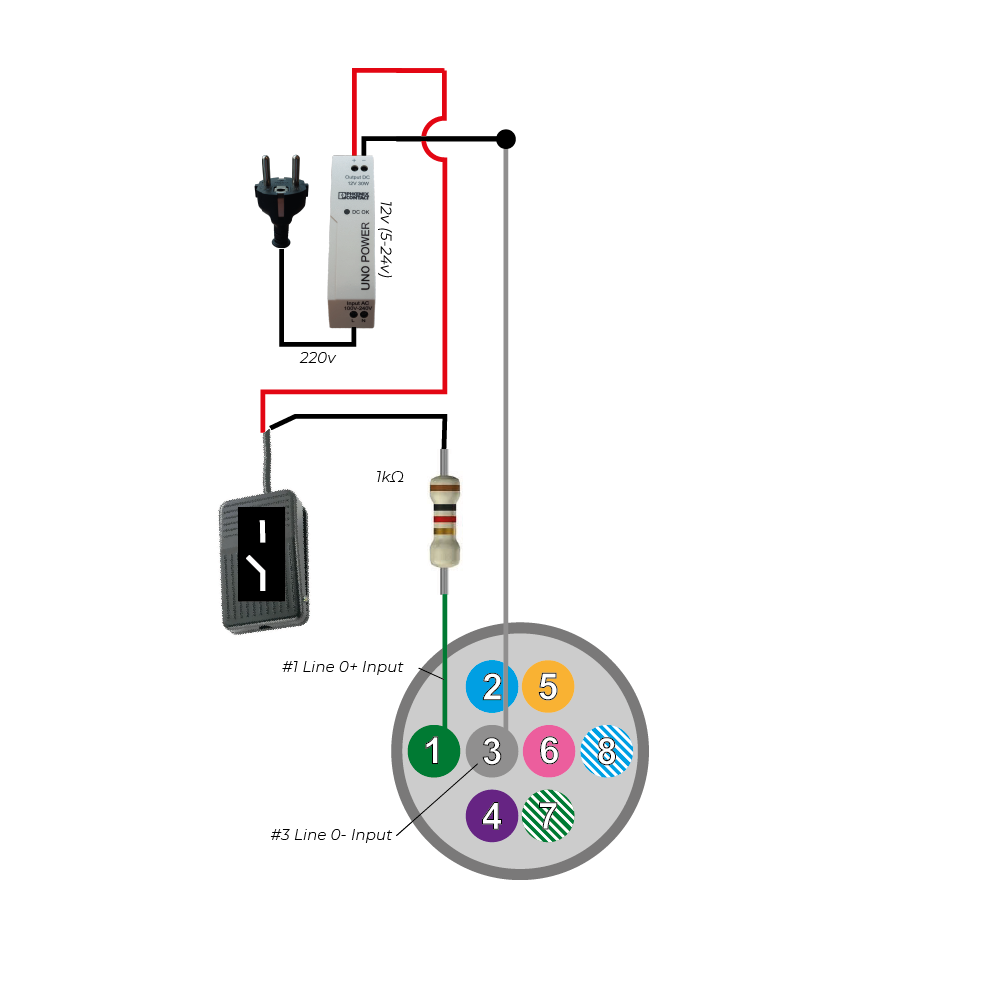
Een voetpedaal gebruiken om de machine vision-camera te activeren
In een ander schema laten we het gebruik zien van het voetpedaal FS-01 als hardwaretrigger voor de machine vision-camera. De voetschakelaar kan worden vervangen door elke analoge tuimelschakelaar die overgaat van open naar dicht.
Activering van een flitser of licht met een machine vision-camera
Om een lichtbron te activeren, kunt u de ‘stroboscoop’-functie toewijzen aan een van de drie uitgangen van de camera. In ons geval wijzen we Lijn1 aan als de uitvoer en stellen we de Lijnbron in op Strobe.
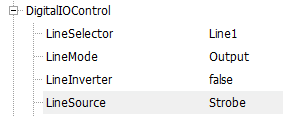
Met deze configuratie functioneert Line1 als stroboscoopuitgang en genereert een hoogspanningssignaal wanneer alle camerapixels klaar zijn om licht op te vangen. Het signaal is laag wanneer geen of slechts een deel van de pixels is voorbereid voor opname.
Bij Global Shutter-camera's zijn alle pixels gereed om tegelijkertijd licht op te vangen. Bij camera's met rolluiken duurt het echter ongeveer 1/framerate (bijvoorbeeld 20 ms voor 50 fps) voordat alle pixels gereed zijn. Het stroboscoopsignaal van een rolluikcamera werkt dus alleen bij belichtingstijden langer dan 1/framerate.
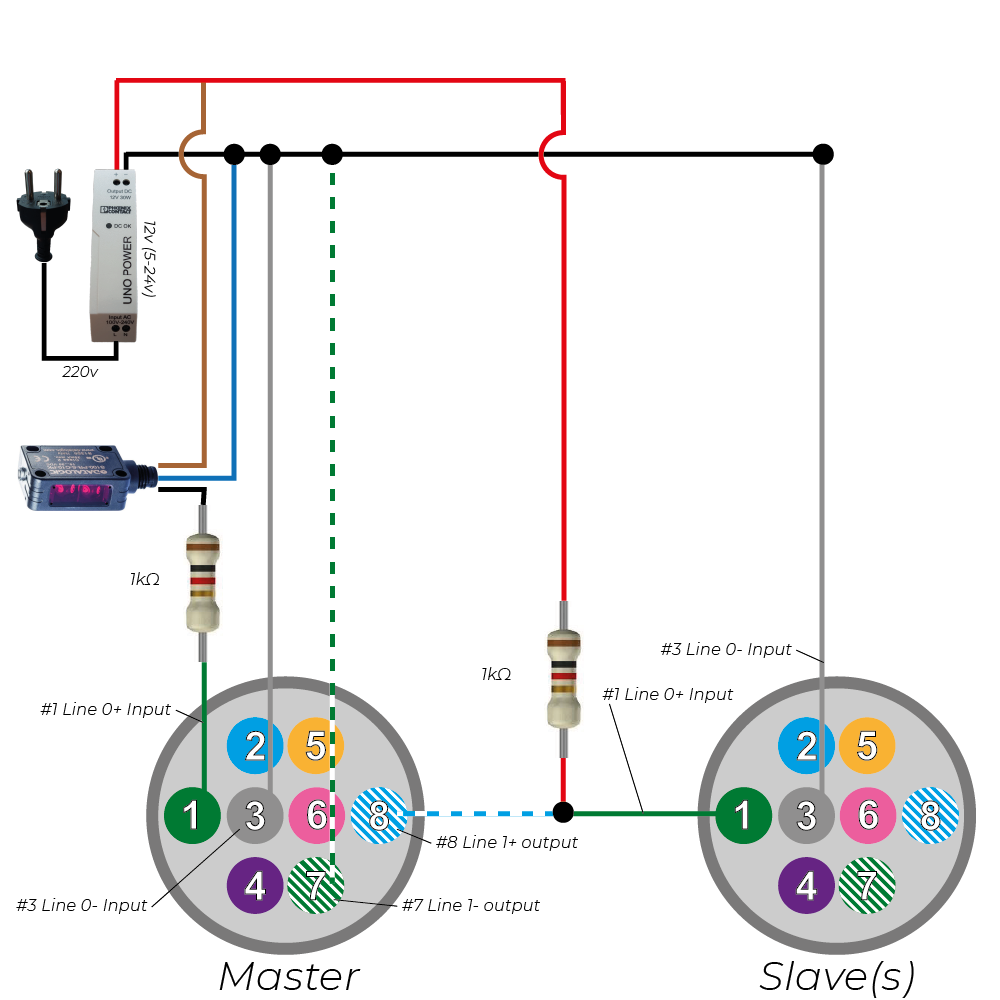
Een tweede machine vision-camera activeren (Master/slave-opstelling)
Hier is een voorbeeld van hoe u een MASTER-camera kunt instellen die wordt geactiveerd door een fotocel, waarbij de SLAVE-camera wordt gesynchroniseerd met de mastercamera.
Wanneer de triggersensor wordt geactiveerd, genereert deze een hoge uitgangsspanning, wat resulteert in een hoge spanning op ingang PIN1 van de mastercamera.
Zodra op PIN1 van de MASTER-camera een stijgende flank wordt gedetecteerd, opent de camera het contact tussen PIN7 en PIN8 zodra alle pixels klaar zijn om licht op te vangen. Standaard zijn pin 7 en 8 normaal gesloten (NC).
- Wanneer het contact tussen PIN7 en PIN8 gesloten is, veroorzaakt dit een lage spanning op zowel pin 7 als pin 8 van de MASTER-camera. Bijgevolg blijft pin 1 van de SLAVE-camera laag. De stroom vloeit van de 24V-voedingsbron via de 1K-weerstand (gebruikt voor stroombegrenzing), via pin 8 van de mastercamera, vervolgens via pin 7 van de mastercamera en terug naar de aarde van de voeding.
- Aan de andere kant, wanneer het contact tussen PIN7 en PIN8 open is, wordt de spanning op pin 7 laag, terwijl de spanning op pin 8 van de mastercamera hoog wordt. Deze spanningsverandering leidt ook tot een hoge spanning op pin 1 van de slavecamera. De stroom vloeit van de 24V-voedingsbron via de 1K-weerstand (gebruikt voor stroombegrenzing), via pin 1 van de slave-camera, vervolgens via pin 3 van de slave-camera, en terug naar de aarde van de voeding.
Dankzij deze opstelling kan de mastercamera de slavecamera effectief en gesynchroniseerd activeren, waardoor een naadloze workflow ontstaat.
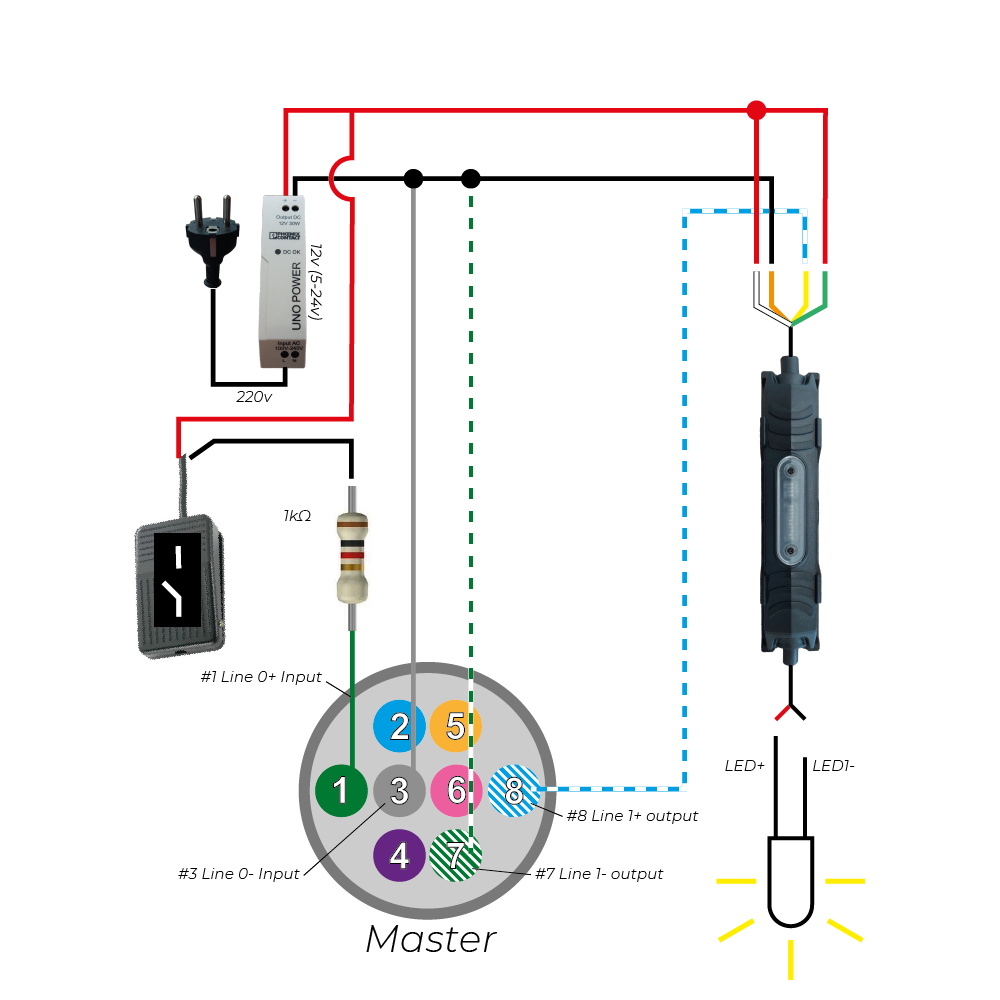
Activeer een externe lichtbron met uw machine vision-camera
Naast de primaire functies kan een machine vision-camera ook een externe lichtbron activeren met behulp van onze stroboscoopcontroller. Hier is een schema dat illustreert hoe een camera een externe stroboscoopcontroller met een LED-licht activeert. Bovendien is er een analoge pedaalschakelaar aangesloten om de controle te verbeteren.
I/O-poort van USB3 en GigE machine vision-camera's
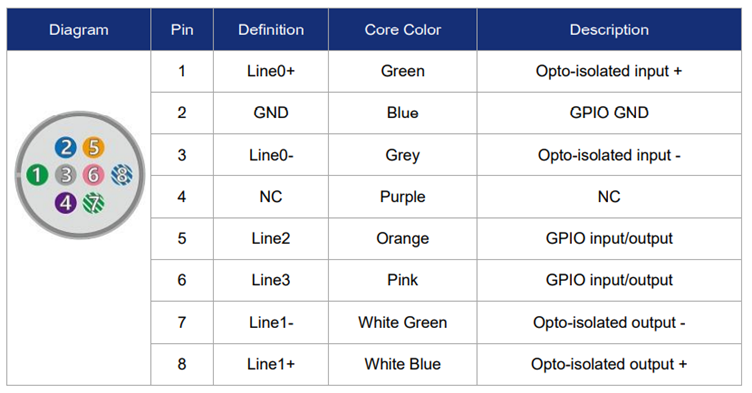
Het is belangrijk op te merken dat de pin-outconfiguratie van een GigE-camera enigszins verschilt van die van een USB3-camera. Bij een GigE-camera is er een optie om de camera van stroom te voorzien via de I/O-connector, terwijl deze mogelijkheid niet beschikbaar is voor USB3-camera's. USB3-camera's zijn afhankelijk van de spanning die door de USB-bus wordt geleverd om de camera van stroom te voorzien. Deze verschillen hebben echter geen invloed op de bovengenoemde schema's voor het activeren van een camera. Om een verbinding tot stand te brengen met behulp van een triggerkabel, hebt u een triggerkabel met een HR25-7TP-8S-stekker nodig, waardoor compatibiliteit en naadloze integratie worden gegarandeerd.
Heeft u vragen over de producten die in onze voorbeelden worden gebruikt of heeft u technische ondersteuning nodig? Lees verder of neem hieronder contact op. Een van onze experts neemt zo snel mogelijk contact met u op.
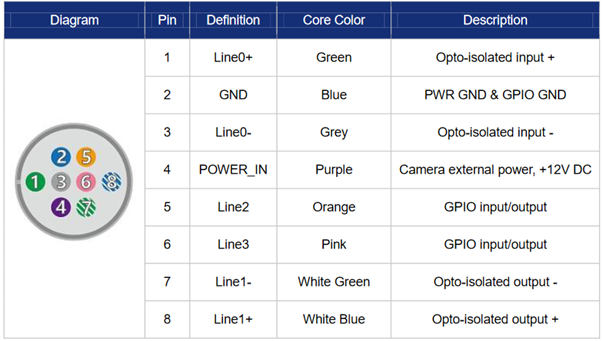
MER2 GigE-camera-I/O
MER2 USB3 camera-I/O
Geavanceerde triggerfuncties
Bij het configureren van uw machine vision-systeem raden wij u ten zeerste aan om lijn 0 als camera-ingang en lijn 1 als camera-uitgang te gebruiken. Deze lijnen bieden optische isolatie en werken binnen specifieke spanningsbereiken, waardoor betrouwbare prestaties worden gegarandeerd:
- Logische 0-spanning: 0V~+2,5V (lijn0/1-spanning) -> Er wordt geen actie geactiveerd.
- Logische 1 spanning: +5V~+24V (Lijn0/1 spanning) -> Actie wordt geactiveerd.
- Het is belangrijk op te merken dat de minimale stroom 7 mA is, terwijl de maximale stroom 25 mA is. Om de stroom effectief te regelen, raden we aan een stroombegrenzende weerstand van meer dan 9V te gebruiken.
In- en uitgangen uitbreiden: gebruik maken van lijn 2 en lijn 3
Als uw toepassing extra in- of uitgangen nodig heeft, kunt u Lijn 2 of Lijn 3 gebruiken. Hoewel deze lijnen geen optische isolatie hebben, kunt u elke lijn als ingang of uitgang programmeren. Houd rekening met de volgende spanningsspecificaties voor lijn 2 en lijn 3:
- Logische 0-ingangsspanning: 0V~+0,6V (Lijn2/3-spanning) -> Er wordt geen actie geactiveerd.
- Logische 1 ingangsspanning: +1,9V~+24V (Lijn2/3-spanning) -> Actie wordt geactiveerd.
- Bij het configureren van Lijn 2 of Lijn 3 als ingang is het essentieel om het gebruik van pull-down-weerstanden van meer dan 1K te vermijden. Anders kan de ingangsspanning van lijn 2 of lijn 3 hoger zijn dan 0,6 V, wat leidt tot een onstabiele herkenning van logische 0.
- Om schade aan GPIO-pinnen (General-Purpose Input/Output) te voorkomen, is het raadzaam om de GND-pin (aarde) aan te sluiten voordat u lijn 2 of lijn 3 van stroom voorziet.
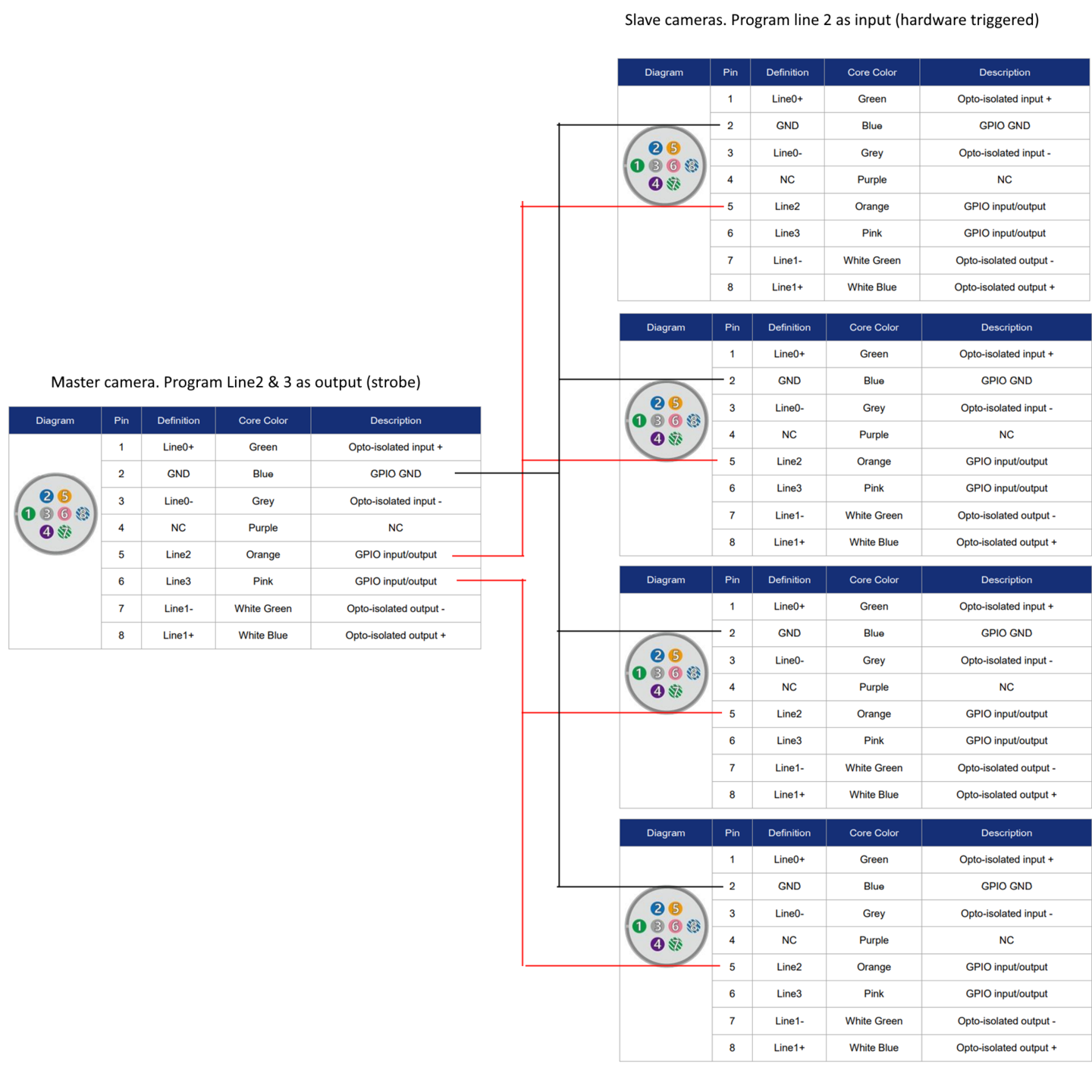
Synchroniseer meerdere machine vision-camera's bij afwezigheid van een externe voeding
Het realiseren van synchronisatie tussen een mastercamera en meerdere slavecamera's is mogelijk zonder dat een externe voeding nodig is. Dit kan worden bereikt door Lijn 2 en Lijn 3 als UITGANG te configureren. Raadpleeg het onderstaande schema voor een beter begrip.
Zodra Lijn 2 en Lijn 3 als uitgang zijn ingesteld, genereren ze een uitgangssignaal van 3,3 V, wat voldoende is om de slavecamera's te activeren. De ingangslijn (lijn 2) van de slavecamera's is op zijn beurt geconfigureerd als een INGANG, waarbij een logische 1 ingangsspanning groter dan +1,9 V wordt gedetecteerd.
Door deze methode te implementeren, is een naadloze synchronisatie van meerdere camera's mogelijk, zonder dat er extra hardware nodig is.
Het is belangrijk om rekening te houden met de kabellengte bij het configureren van het systeem. Omdat de uitgangsspanning 3,3 V bedraagt en de minimale spanning die nodig is voor triggering 1,9 V bedraagt, is het van cruciaal belang om de lengte van de I/O-kabel zo kort mogelijk te houden. Lange kabels kunnen vanwege de interne kabelweerstand leiden tot een spanningsval, waardoor de ontvangen ingangsspanning onder het kritische niveau van 1,9 V komt. Dit kan ertoe leiden dat de slavecamera's onvoldoende worden geactiveerd.
Om langere kabellengtes aan te kunnen, raden we aan een externe voeding te gebruiken om het uitgangsspanningsniveau te verhogen, waardoor een betrouwbare triggering in het hele systeem wordt gegarandeerd.
Bovendien heeft hardwaretrigger verschillende kenmerken en opties om de installatie nog betrouwbaarder te maken.
Stijgende/dalende flankvertraging is de tijd die de camera nodig heeft om te “bevestigen” dat een trigger heeft plaatsgevonden.
Frametrigger wait: De camera-uitvoer wordt hoog wanneer de camera klaar is om een nieuwe hardwaretrigger te ontvangen. Met deze optie kunt u de hoogste hardware-triggersnelheid bereiken.
Ingangsdebouncer: filtering van stijgende flanken en filtering van dalende flanken, specificeert de minimale duur van de puls die als een geldig signaal moet worden beschouwd. U kunt ruis uit het triggersignaal filteren om triggers veroorzaakt door ruis te voorkomen.
Triggervertraging: De tijd tussen het bevestigen van de trigger en het uitvoeren van de triggeractie.
Ingangsomvormer: De gebruiker kan selecteren of het ingangsniveau omgekeerd is of niet door "LineInverter" in te stellen.
Verbetering van I/O-mogelijkheden: RS232-functionaliteit aangepast voor uw machine vision-camera
Heeft u behoefte aan extra I/O-functies, zoals RS232, voor uw industriële camera? Als uw specifieke toepassing speciale functionaliteiten vereist voor de I/O-connector van uw camera, zoals het gebruik van GPIO als RS232-poort, dan hebben wij de oplossing voor u. Ons team kan aangepaste firmware maken die is afgestemd op uw unieke vereisten.
Ontgrendel het volledige potentieel van uw industriële camera door gespecialiseerde I/O-functies te integreren. Of u nu RS232-mogelijkheden of andere specifieke functionaliteiten nodig heeft, onze experts staan klaar om u te helpen. Neem vandaag nog contact met ons op om de mogelijkheden te verkennen en de I/O-mogelijkheden van uw industriële camera te verbeteren.