


Menu
3 STEP PROCESS FOR DOWNLOADING INSTALLING AND RUNNING THE LINUX GALAXY SDK FOR YOUR ARM BASED HARDWARE LIKE RASPBERRY PI OR NVIDIA JETSON

Learn how to download, install and use the Linux Galaxy Software Development Kit (SDK) for ARM-based hardware like the Raspberry Pi or Nvidia Jetson. By modifying camera parameters with this SDK, you can acquire images on our USB3 and GigE cameras. With our cameras, we have tested small development boards like the Nvidia Jetson series and the Raspberry Pi. The images in the article are from Linux running development boards. The appearance on your machine may vary. In this article, we will walk you through the 3 simple steps to download, install, and use the Galaxy View SDK on Linux for ARM-based hardware.
STEP 1: DOWNLOAD THE LINUX GALAXY SDK
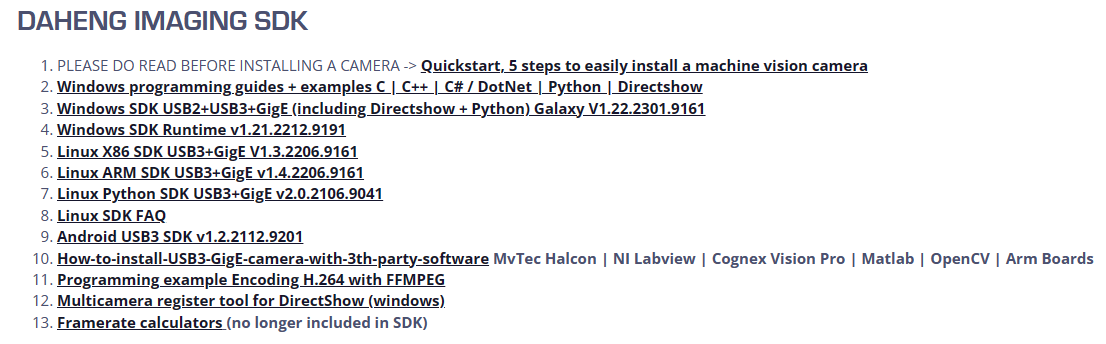
Visit our download page to select the most suitable Linux Galaxy SDK version for your hardware architecture. For ARM-based hardware like the Raspberry Pi or Nvidia Jetson, choose the Linux ARM SDK (number 6 in the screenshot below).
STEP 2: INSTALL THE SDK
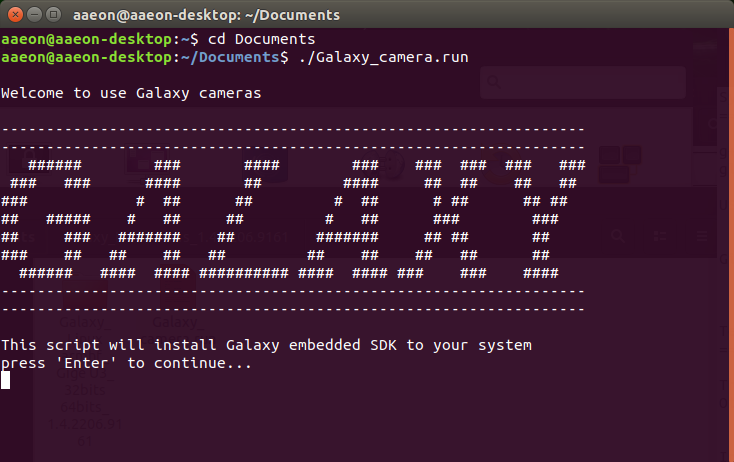
Once you have downloaded the Linux ARM SDK, open the folder and follow the step-by-step guide in the README file. Check your Linux system requirements before running the Galaxy_camera.run file to install the Galaxy SDK, which includes GxViewer and GxGigeIPConfig.
STEP 3: CONFIGURATE THE CAMERA AND RUN GALAXY VIEW
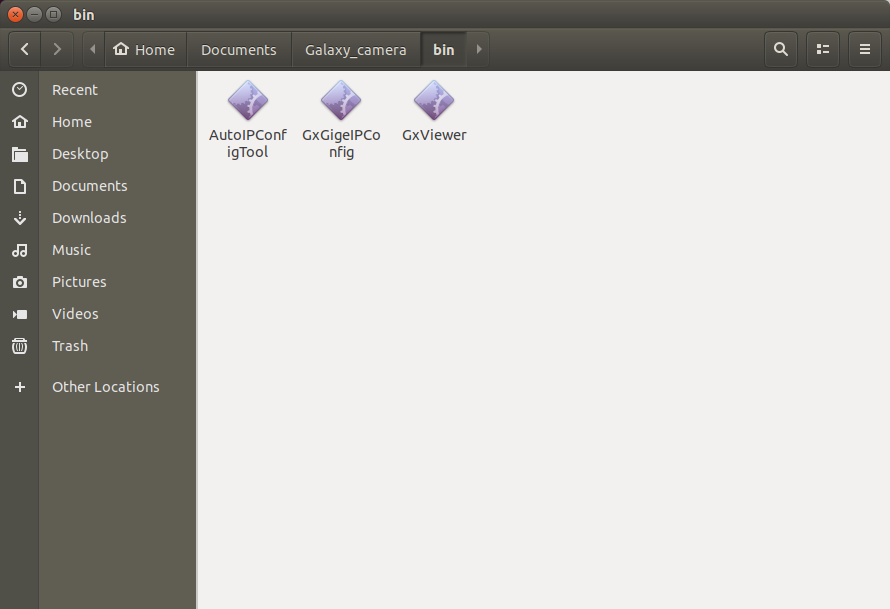
After installing the Galaxy SDK, the Galaxy camera folder will be created in the same location as the Galaxy_camera.run file. Within this folder, you will find GxGigeIPConfig and GxView.
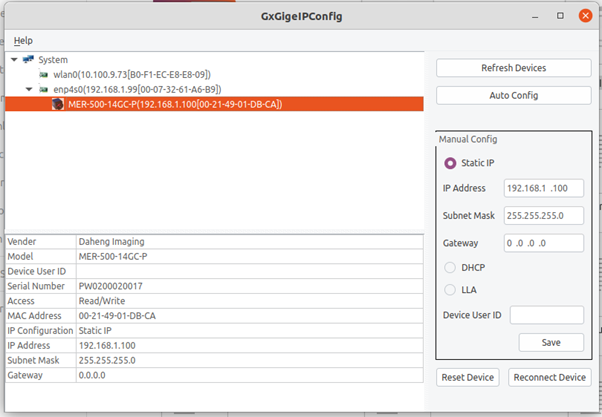
GxGigeIPConfig
Use this program to configure an industrial GigE camera by inserting the proper IP address. The AutoConfig button will program a working IP address automatically, or you can set it up manually. If the network address of the camera and Ethernet adapter do not match, the camera will not display properly in GxViewer.
GxViewer
After configuring your camera, run GxViewer to modify your industrial camera parameters and grab pictures without coding. Choose your camera in the software and open a connection with OpenDevice. Then, you can modify basic parameters like ROI, exposure, gain, and white balance.
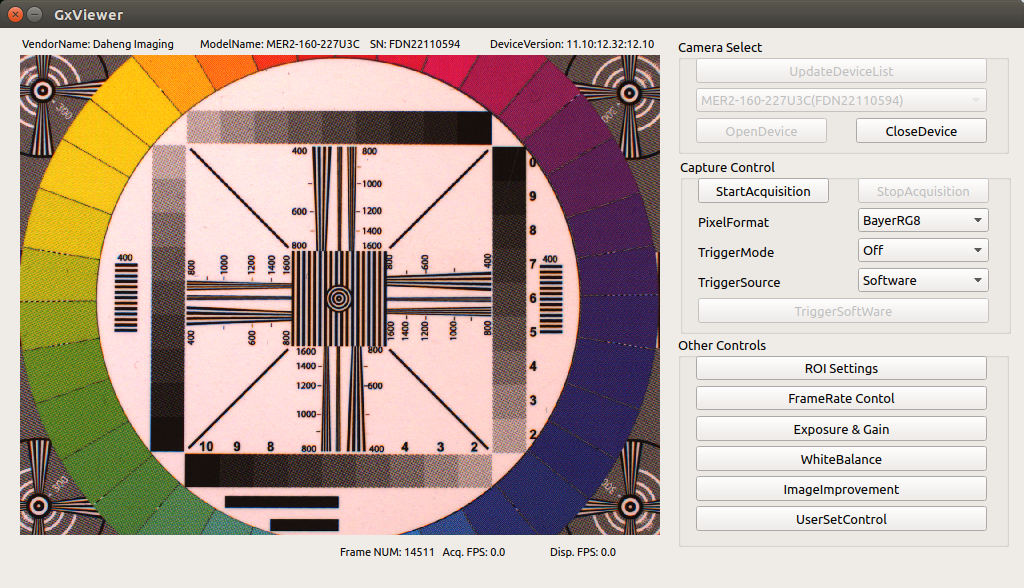
Note that the options are limited compared to Galaxy Viewer for X86 hardware platforms, but the missing functions can be used within your application by writing your own program using the SDK.
REMARKS
We tested a board for Nvidia Jetson TX2 NX with two MER2-160-227U3C cameras. You can open an individual GxViewer for each camera. The frame rate was 190fps with one active camera and dropped to 130fps when both cameras were attached. This shows that the USB3 port is not powerful enough to use the full bandwidth of USB3. Keep in mind that other hardware may affect performance.
Not all USB3 ports will support USB3 industrial vision cameras on some small development boards. For example, when using Nvidia Jetson TX2 NX, one in four USB3 ports did not support a camera.
LINUX SDK ON AN ARM BASED DEVELOPMENT BOARD FURTHER SOLUTIONS
If you encounter problems with Daheng Imaging C++ or Python SDK installation on an ARM-based development board, contact isupport@get-cameras.com. Our technical support department will be glad to assist you.
Sunday,Monday,Tuesday,Wednesday,Thursday,Friday,Saturday
January,February,March,April,May,June,July,August,September,October,November,December
Not enough items available. Only [max] left.
Add to WishlistBrowse WishlistRemove Wishlist