


Menu
HOE U BEELDEN VAN UW INDUSTRIËLE CAMERA VERKRIJGT DOOR ARAVIS OP LINUX TE INSTALLEREN

Aravis is een machine vision-softwarekit die is ontwikkeld om meerdere machine vision-camera's tegelijkertijd te gebruiken, ongeacht de fabrikant. Het is een op objecten gebaseerde visiebibliotheek, oorspronkelijk gemaakt voor Linux, om beelden van digitale industriële camera's te besturen en te verwerven, en wordt geleverd met een eenvoudige viewerinterface. In dit artikel beschrijven we hoe u Aravis op Linux installeert met behulp van Python en begint met het verkrijgen van afbeeldingen van uw industriële camera.
STAP 1: INSTALLEER PYTHON EN PIP OP JE LINUX-COMPUTER
Om Python en Pip te installeren, opent u de Linux-terminal en voert u de volgende regels in: $ sudo apt update
$ sudo apt install python3.8
$ sudo apt install python3-pip $ python3 --version
$ pip3 --version
STAP 2: INSTALLEER MESON EN NINJA
Installeer Meson en Ninja met Python met behulp van de volgende regel:
$ pip3 install --user meson
$ pip3 install ninjaDe basisvereisten zijn nu geïnstalleerd.
STAP 3: INSTALLEER DE NIEUWSTE VERSIE VAN ARAVIS
Om Aravis vanaf de bron te installeren, downloadt u de nieuwste release van https://github.com/AravisProject/aravis/releases . Omdat er maar één versie beschikbaar is voor Linux, Windows en Mac, kunnen we Aravis vanaf de bron bouwen. Voordat we Aravis bouwen, moeten we echter de afhankelijkheden installeren. U kunt de gedetailleerde lijst met afhankelijkheden vinden in het bestand “meson.build”. 
Om de meeste benodigde afhankelijkheden te installeren, kunt u de volgende opdracht gebruiken:
$ sudo apt install libxml2-dev libglib2.0-dev cmake libusb-1.0-0-dev gobject-introspection \
libgtk-3-dev gtk-doc-tools xsltproc libgstreamer1.0-dev \
libgstreamer-plugins-base1.0-dev libgstreamer-plugins-good1.0-dev \
libgirepository1.0-devOptioneel : voor kleurenvisiecamera's zijn extra plug-ins voor "gstreamer" nodig:
$ sudo apt-get install gstreamer1.0-plugins-badVolg de Linux-tutorial op hun website: Installeren | CMaak
Voordat u Aravis bouwt, moet u de nieuwste versie van “cmake” en “gi-docgen” installeren met behulp van de volgende regels:
$ pip3 install --user gi-docgen
Nu zijn we klaar om Aravis te bouwen. Gebruik de volgende opdrachten om Aravis te bouwen:
$ meson build
$ cd build
$ sudo ninja
$ sudo ninja installKopieer het bestand “aravis.rules” naar de Linux-apparaatbeheerder “udev: etc/udev/rules.d” met behulp van de volgende regel:
$ sudo cp ~/Path/to/your/Aravis/src/aravis.rules /etc/udev/rules.d
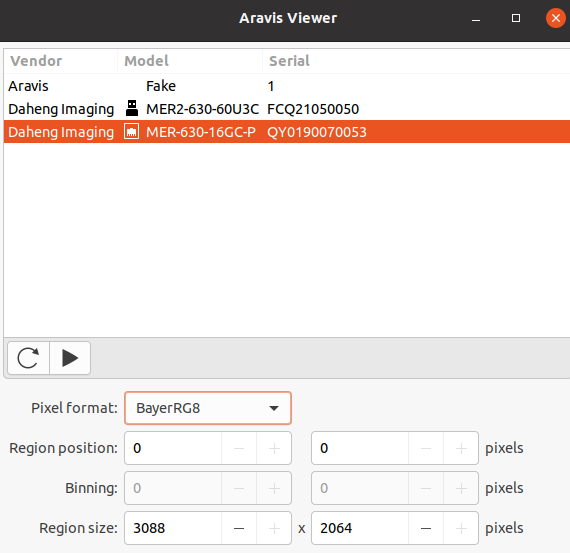
Start uw computer opnieuw op om de installatie te voltooien. Nadat u uw computer opnieuw hebt opgestart, navigeert u via uw Linux-terminal naar de viewer en start u het programma.
~/Path/to/your/Aravis/build/viewer$ ./arv-viewer-XXSluit uw camera aan en klik op de herlaadknop. U zou nu de naam van uw aangesloten camera en het serienummer moeten zien. Klik op uw camera en druk op de afspeelknop om de acquisitie te starten. U zou nu een livefeed van de geselecteerde camera moeten krijgen.
(Getest op Linux Ubuntu 20.04, met een MER-160-227U3M-L machine vision-camera)
De Aravis-viewer werkt voor zowel onze USB3- als onze GigE-camera's. Voor de GigE-camera's moet u eerst de IP-instellingen configureren, net zoals u dat bij GalaxyView zou doen. Nadat het IP-adres is geconfigureerd, werkt de GigE met de Aravis-viewer.
HEBT U TECHNISCHE ONDERSTEUNING NODIG?
Als u deze stappen heeft gevolgd maar niet het gewenste resultaat heeft gekregen, neem dan contact op met onze technische ondersteuningsmedewerkers ! Eén van onze vision engineers beantwoordt uw vraag binnen 24 uur. Heeft u andere technische vragen op het gebied van machine vision? Bezoek dan ons kenniscentrum machine vision . We uploaden regelmatig nieuwe technische artikelen.
Wilt u op de hoogte blijven van onze visieartikelen, volg dan onze pagina op LinkedIn . We plaatsen elk nieuw artikel na de publicatie ervan.
Zondag maandag dinsdag woensdag donderdag vrijdag zaterdag
januari, februari, maart, april, mei, juni, juli, augustus, september, oktober, november, december
Niet genoeg artikelen beschikbaar. Nog maar [max] over.
Voeg toe aan verlanglijstBlader door verlanglijstVerwijder verlanglijst